―、起重机(
杭州起重机、
杭州电动葫芦、
单梁起重机、
悬挂式起重机)主电路分析
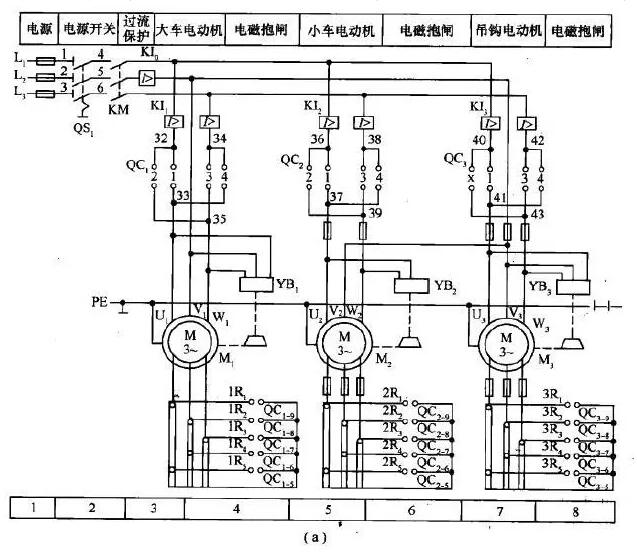
该台起重机配置3台电动机M1、M2和M3,它们分别是大车、小车和吊钩电动机(见图1-8),均为绕线式,且都采用串接电阻(1R、2R、3R)的方法实现启动和逐级调速。M1、M2和M3的正反转以及电阻1R、2R、3R的逐级切除,分别用凸轮控制器QC1、QC2、QC3控制。
YB1,YB2,YB3为制动电磁铁,分别与电动机M1、M2、M3的定子绕组并联,以实现得电松闸,失电抱闸的制动作用。这样在电动机定子绕组失电时,制动电磁铁失电,电磁抱闸抱紧,就可以避免重物自由下落而造成的伤害。
电流继电器KI1,KI2,KI3分别作电动机M1、M2、M3的过电流保护。电源电路则采用电流继电器KI0实现过电流保护。
二、起重机(杭州起重机、杭州电动葫芦、单梁起重机、悬挂式起重机)凸轮控制器
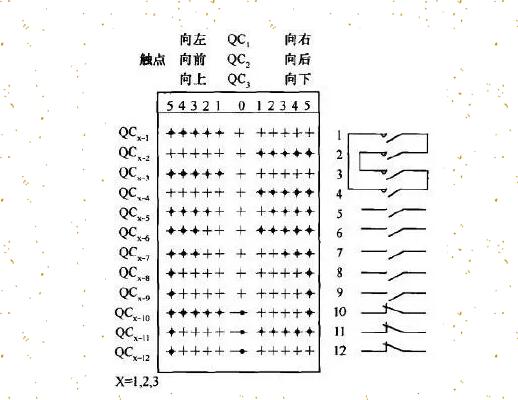
各凸轮控制器QC1、QC2、QC3都在“0”位时,才可以接通交流电源,在开关QS1闭合状态下,按动启动按钮SB,接触器KM得电吸合并自锁,然后可由QC1~QC3分别控制各电动机,凸轮控制器的触点工作状态如图1-9所示。
凸轮控制器是一种多触点、多位置的转换开关。凸轮控制器QC3、QC2、QC1分别对大车、小车、吊钩电动机M3~M1实行控制。各凸轮控制器的位数为5-0-5,共有11个操作位,共有12副触点,其中4副触点(1、2、3、4)控制各相对应电动机的正反转,5副触点(5~9)控制电动机的启动和分级短接相应电阻,两副触点(10、11)和限位开关配合,用于大车行车、小车行车和吊钩提升极限位置的保护,另一副触点(12)用于零位启动保护。

三、起重机(杭州起重机、杭州电动葫芦、单梁起重机、悬挂式起重机)控制电路分析
1.准备工作
合上开关QS1,把凸轮控制器QC1、QC2、QC3的手柄置于零位,把驾驶室上的舱口门和桥架两端的门关好,合上紧急开关SA。按下启动按钮SB[11],使交流接触器KM[10]得电吸合,其辅助动合触点KM(21-22)、KM(17-21)闭合自锁,其主触点[2]闭合,接通总电源,为各电动机的启动作好准备。 •
大车、小车及提升凸轮控制器触点QC1-10、QC1-11、QC2-11、QC3-10、QC3-11和大车、小车及提升机构的限位开关SQ4~SQ8接成串并联电路与接触器KM辅助触点构成自锁电路使大车、小车等到了极限位置,相应限位开关断开,凸轮控制器归“0”再次反向运动,即可限出极限。
2.小车控制(见图1-8及图1-9)
(1)小车向前,把QC2手柄在向前方向转到“1”位,则QC2手柄向前方向转到“1”位:
1、QC2(36-37)(即QC2-1)[5]
2、QC2(38-39)(QC2-3)[5]
3、QC2-10(自锁)
以上三种情况:M2、YB小车向前移动把QC2手柄在“向前”从“1”转到“2”位,则QC2手柄向前方向转到“2”位:
1、QC2-10(自锁)
2、QC2(36-37)
3、QC2(38-39)
4、QC2-5
以上情况:第1、2、3种情况→M 2;第4种→短接电阻R5→M2加速,小车向前加快移动
把QC2手柄在“向前”从“2”转到“3”、“4”、“5”位时,其触点QC2(36-37)[5]、QC2(38-39)[5]和QC2-5继续保持闭合,而在“3”、“4”、“5”位时,触点QC2-5、QC2-5~QC2-6、QC2-5~QC2-7、QC2-5~QC2-9分别接通,相应短接电阻2R5,2R4、2R3、2R2、2R1,小车速度逐渐加快。
(2)小车向后,把QC2手柄转到“向后”方向的位置上,其工作原理与小车“向前”控制相似。
3.大车、吊钩控制
大车“向左”“向右”控制,把QC手柄转到“向左”、“向右”方向的位置上;吊钩“向上”、“向下”控制,把QC3手柄转到“向上”、“向下”位置上,其工作原理与小车“向前”控制相似。
四、起重机(杭州起重机、杭州电动葫芦、单梁起重机、悬挂式起重机)故障分析
1.合上电源开关QS1按下SB1主接触器FM1不吸合
(1)电路无电压,用万用表测世QS1进线处。
(2)熔断器熔断,更换。
(3)紧急开关SA及限位开关SQ1、SQ2、SQ3未合上。
(4)凸轮控制器没在零位,则QC1-12、QC3-12、QC2-12断开。应将控制器手柄扳在零位。
2.按下SB1按钮过流继电器动作
则故障为QC1、QC2、QC3或电动机M1、M2、M3接地或短路,可分别断开进行分断检査。
3.凸轮控制器冒火花
故障为控制器触点与铜片接触不良。
4.制动电磁铁过热
制动电磁铁线圈匝间短路,更换。